
| International Journal of Engineering & Technology IJET-IJENS Vol:15 No:05 | 12 |
Dynamic Modeling and Active Vibration Control
of a Flexible Beam: A Review
Noor Fadhilah Mat Ros, Mohd Sazli Saad, Intan Zaurah Mat Darus
Abstract— This paper reviews the study of active vibration control of a flexible beam by using smart materials. The objective of this paper is to find out what have been developed by the researchers in recent years and previous research regarding to the active vibration controls. The different techniques used by each researcher are very essentials in contribution of controlling vibration. All the findings are summarized according to modeling strategies and type of the controller can used to control vibration by proving the efficiency of each strategy based on results from the literature.
Index Term— Active vibration control, flexible beam, structural modeling, beam modeling.
- I. INTRODUCTION
Vibration is mechanical phenomenon which oscillations occur about an equilibrium point and it also happen when mechanical mechanism is moved intentionally and unintentionally. The unwanted vibration may cause damage to the structures or degradation to system‟s performance [1]. The aircraft structures are always tend to be impacted by winds, forces and vibration during travelling in space. The high vibration impact will affect the stability of the aircraft and accuracy during travelling. The long term of vibration exposure will cause damage to the structure and will be risky to human‟s health in space operation [2]. In order to reduce or eliminate the vibrational effects in the mechanical structure, several approaches have been developed such as passive vibration and active vibration techniques. Passive vibration control usually has added weight such as a damper to reduce vibration. It works well in high frequencies or in a narrow frequency range but has added weight to mechanical structure [3]. Active vibration control (AVC) is a concept in which vibration of a structure is controlled by applying counter force to the structure which out of phase but equal in amplitude to the original force. So, the two opposite forces will cancel each other and the vibration will be stopped [4]. It has become useful approach in the recent years, due to improvement of vibration susceptibility of light weight structure with the least possible increase in mass [5].
Noor Fadhilah Mat Ros is a postgraduate student from School of Manufacturing Engineering, Universiti Malaysia Perlis, Malaysia. (e-mail: noor_fadhilah@ymail.com).
Mohd Sazli Saad is with the Green Design and Manufacture Research Group, Center of Excellence Geopolymer and Green Technology (CEGeoGTech), and School of Manufacturing Engineering, Universiti Malaysia Perlis, Kampus Tetap Pauh Putra, 02600 Arau, Perlis, Malaysia His research interest is active vibration control, system identification and control system. (e-mail: sazlisaad@unimap.edu.my).
Intan Zaurah Mat Darus Intan Zaurah Mat Darus, Department of System Dynamics & Control, Faculty of Mechanical Engineering, Universiti Teknologi Malaysia , Johor Bahru, Johor, Malaysia (intan@fkm.utm.my)
AVC has light weight compared to passive vibration. Its mechanical structure usually included with sensors and actuators which operated by a controller. Smart structures like piezoelectric material can be used as actuators or sensors. This material has ability to transform mechanical energy to electrical energy [4]. Other than that, piezoelectric has received much attention in vibration control during recent years because it consumed low energy, light weight, small density and large bandwidth [6]. Figure 1 below show the schematic which represents the general system of AVC with the main components in closed loop system. The beam usually clamped at the one end of beam (cantilever) and the piezoelectric patches also bonded near the fixed end of beam. The mechanical properties of the beam such dimensions, density, poison ratio, young modulus and mass are taken into consideration which closely related to the dynamic characteristic of the beam.
Two piezoelectric actuators are collocated; one for exciting the beam and another one for applying control force to the beam for damping the disturbances came from the other actuator. A piezoelectric sensor used for sensing the deflection of beam when the beam is applied the disturbance. Piezoelectric material has characteristics of generating electric voltage, when it is applied mechanical stress and it also can generate the mechanical stress or deformation when applied with electric field. The amplifier usually used to amplify the voltage from or to data acquisition system. Data acquisition system is generally used to interface the experimental rig with computer system which included certain software like
MATLAB.
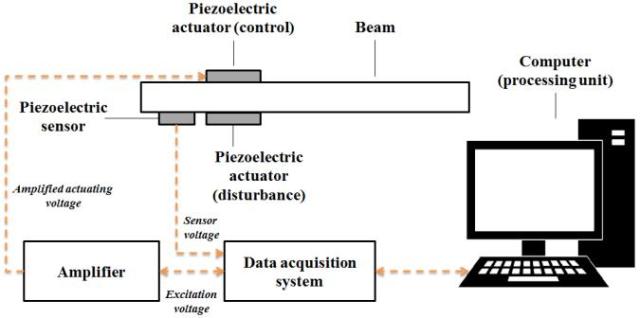
Fig 1. Schematic representation of closed loop system of AVC
Based on the general working principle, the piezoelectric disturbance actuator will generate the unwanted
152905-4848-IJET-IJENS © October 2015 IJENS
I J E N S
| International Journal of Engineering & Technology IJET-IJENS Vol:15 No:05 | 13 |
vibration to the structure. The displacement of a flexible beam which detected by sensor is transmitted to computer control system through DAQ system. The control algorithms in the computer control system will compute the amount of control signal send to piezo control actuator and the control signals needs to be amplified using amplifier. This is to ensure that sufficient amount of blocking force can be applied to cancel the vibration of flexible beam.
This review paper presented the different strategies in modeling beam and active control using different types of controllers. All the methods presented are mostly applied on flexible beam with bonded piezoelectric actuator/sensor and the literature proved that it works well in suppressing the vibration.
(PDE) are written in terms of finite difference equations. Its approximation is applied to each interior point so that the displacement of each node is related to the values at the other nodes in the grid connected to it. It is easy to program, but not suitable for problems with irregular geometries. The entire solution domain is divided into small finite elements. The beam is discretized into a finite number of equal-length segments, each of length, ∆x and the deflection of beam at the end of each segment is sampled at a constant time, ∆t. Equation (1) below is partial differential equation (PDE).
- DYNAMIC MODELING OF FLEXIBLE BEAM
Modeling is the process of developing the mathematical model of physical structure (beam/plant) by taking the characteristics of the structure to obtain its dynamic response, so that the controller can be designed to provide
| desirable performance | [7]. In | normal | engineering | |
| investigation process, | a complex | physical | system | is |
mathematically modeled so that further process can be easily carry out on the model instead of actual system. This helps in attaining a clearer understanding of the system‟s dynamics.
Once the tests are confirmed with respect to the model response, it can be carried out on the physical system The common approaches used in modeling of flexible beam are finite element method (FEM), finite difference model (FDM) and parametric system identification.
Finite element method is techniques for numerically solving the differential equations [8]. The behavior of the beam is described by the displacements of the elements and material law. FEM is very suitable for problems of complex geometries [9]. The more finite elements, the more accurate results we get [4]. Usually the modeling started with the regular beam element and then modeling of the smart beam element with piezoelectric sensor/actuator pair [10]. Finally all the elements are assembled using FE analysis. Zhang et al. [11], Zoric et al. [12], Alam and Rahman, [13], Marinaki et al. [14], Jovanovic et al.[15], Qiu et al. [16] and Arun et al. [17] developed the model of beam in FEM based on the beam‟s mechanical theory and principle.
One of the purposes of FEM is for modal analysis and it deals with dynamics behavior of mechanical structures under the dynamics excitation [18]. Oveisi and Nestorovic.[19], Khot et al.[20] and Fei et al. [6] find the frequency and mode shapes of beam using FEM. The final mathematical model derived from FEM usually simulated in software to obtain the frequency and mode shapes of beam like the study done by Mirafzal et al.[21] and Shouwei et al. [22].
Besides that, FEM can be used to find the optimal placement of the sensor/actuator on surface of beam [4, 23]. The agreement from literatures clearly proved that the best result obtained when PZT patches bonded near the fixed end.
Finite difference method (FDM) is a method which the entire solution domain is divided into grid of „cells‟. The derivatives in the governing partial differential equations
where u(x,t) is the actuating force applied at a distance, x, from its fixed end at time, t, y(x,t) is the beam‟s deflection at a distance, x, from its fixed end at time, t, μ is the beam constant represented by μ² = EI / ρA with E, I, ρ and A representing Young‟s modulus, moment of f inertia, mass density and cross sectional area respectively and m is mass of the beam. By using first-order central finite difference, the PDE in (1) becomes final mathematical model (2):
where U(x, t) is an n×1 matrix which represents the actuating force applied on the beam, Yk, (k = j−1, j, j+1) is an n×1 matrix which is the deflection of the beam at segment 1 to n at time step k and S is known as stiffness matrix, which give the characteristic of the beam and λ² = [(∆t²) / (∆x4)]. The dynamic behavior of the beam can be simulated using (2), which can be programmed in MATLAB.
Due to its difficulty to vary the size of the difference cells in particular regions, FDM is not suitable for problem with rapid changing variables [9]. Mohammed et al. [24] and Fadil et al. [25] modeled rectangular plate and flexible beam respectively using FDM to create the vibration data in order to control vibration. Mohamad et al. (2011)[26] which used FDM to model beam showed that the model is only possible to apply the lateral excitation force but not the bending moments on to the beam. Raju et al. [27] and Saad et al. [3] established dynamic model in FDM by formulating beam and its motion in transverse vibration. The simulation of the model usually needs to be validated to ensure efficiency of the model and it usually done by comparing the natural frequencies extracted from simulation with the theoretical values [28]. A simulation of flexible plate or beam via FDM is easy to implement and the method has been proven effective in investigating dynamics behavior of structures.
Other than using finite modeling, the dynamic behavior of the physical system can be found using system identification
technique. The most common model used is black box parametric model. The model structure and parameters of black
152905-4848-IJET-IJENS © October 2015 IJENS
I J E N S
| International Journal of Engineering & Technology IJET-IJENS Vol:15 No:05 | 14 |
box is completely unknown and only estimated from input/output data The objective of parametric identification is to find an exact models of dynamic systems based on input and output data [29]. It identified the system model which associated with the coefficient set of parameters. The basic steps of the process can be represented in Figure 1 below [30].
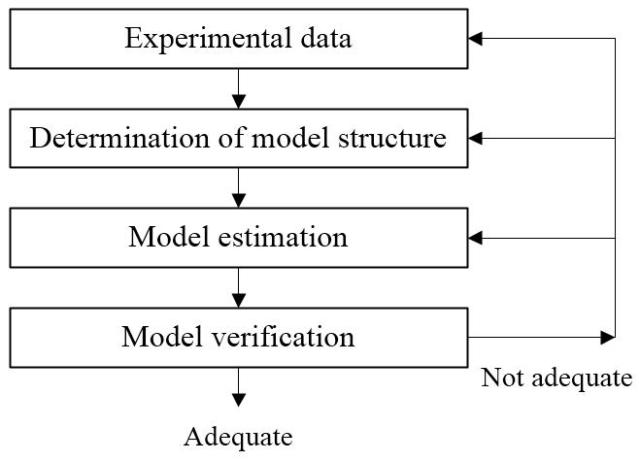
Fig. 2. Parametric identification procedure [30]
The first phase is collecting input and output data from the experiment. Then, the model structure like autoregressive exogenous input (ARX) [3,24,2,31,32,33] or autoregressive moving average exogenous input (ARMAX) is selected [31,32]. The complexity of structure affects the accuracy of the model which can approximate the real process [30]. The best model structure selected usually need be estimated by algorithm to obtain parameters of the model. The conventional estimation algorithm like recursive least square (RLS) is one algorithm which widely used [29,33,34,35,36].
Recently, since the development of soft computing techniques such as evolutionary algorithm (EAs), the estimation using EAs becomes popular [24,26,29,36]. This is because the conventional techniques often fail in the search for the global optimum if the search apace is not linear in the parameters. An alternative strategies using evolutionary algorithm could provide better solution. In final phase, the final model acquired need to be verified by any validation method such mean square error, input-output mapping, correlation test and others [30] to ensure that the model is accurate and good enough to represent the system to be controlled in next phase.
Modeling is a crucial process in designing a control system. Any techniques can be applied depends on the knowledge of dynamic properties of the plant to be controlled. Each technique has its own complexity and usually it is chosen based on the suitability of the plant. The best model obtained will give a lot of contribution in terms of efficiency of the controller. The comparison of the three described techniques is shown in table 1.
Table I
Comparison of different modeling approach
| Finite element | Finite difference | System | |
| method | method | identification | |
| Suitable for | Not suitable for | ||
| simple and | Suitable for any | ||
| irregular | |||
| complex | geometries | ||
| geometries | |||
| geometries | |||
|
|
|||
| Required the deep | Required the deep | ||
| knowledge of | knowledge of | Not overall | |
| mechanical theory | mechanical theory | mechanical | |
| of beam in | of beam in | theory of beam is | |
| modeling smart | modeling smart | required | |
| beam | beam | ||
| Do not required | Do not required | Required input | |
| and output data | |||
| input and output | input and output | ||
| from experiment | |||
| data from | data from | ||
| to the develop | |||
| experiment | experiment | ||
| model | |||
| Can be integrated | |||
| Whole modeling | Whole modeling | with FEM and | |
| process cannot be | process cannot be | FDM to acquire | |
| integrated with | integrated with | input and output | |
| other approach | other approach | data from | |
| simulation | |||
| Need to | Partial differential | Using equation | |
| considered sensor, | equation (PDE) is | ||
| of model | |||
| actuator and beam | considered in | ||
| structure (ARX, | |||
| equations in | finding final | ||
| ARMAX) to | |||
| formulation of | mathematical | ||
| construct model | |||
| smart beam | model of beam | ||
III. VIBRATION CONTROL
Active vibration control is an area that incorporates an interdisciplinary technologies and typical AVC system is integration of mechanical and electronic components with computer microprocessor control combination. The major components of any AVC system are the plant structure which applied disturbance by and sensor which perceived vibration, controller to control system to behave in desired manner, while meeting a set of performance specifications and actuator which counteract the influence of disturbance on structure [7]. The plant and controller are two essential components of control system. Many kinds of controller are found to be used by researchers in vibration control of beam such as conventional, adaptive and robust controllers. The common study of flexible beam are found using conventional controllers like PD and PID [3,4,6,13,20,23,25,33,34].
Application of PID controller can be found in many industries like oil and gas, chemical, foods and many more. It has been proven in terms of reliability and robustness in controlling process variables ranging from temperature, level, pressure, flow, PH and others. Industries attracted to used PID controller because it has low cost, easy to maintain, simplicity in control structures and easy to understand.
152905-4848-IJET-IJENS © October 2015 IJENS
I J E N S
| International Journal of Engineering & Technology IJET-IJENS Vol:15 No:05 | 15 |
The general PID control law that can be shown as follow:
| ∫ | (3) |
y(t) is control signal, Kp, Ki and Kd are proportional, integral and derivatives gains respectively and e(t) and ė(t) are error signal and its derivative respectively. These three gains can be tuned in order to provide fine control for the application. Figure 3 shows the block diagram for typical principle of PID controller.
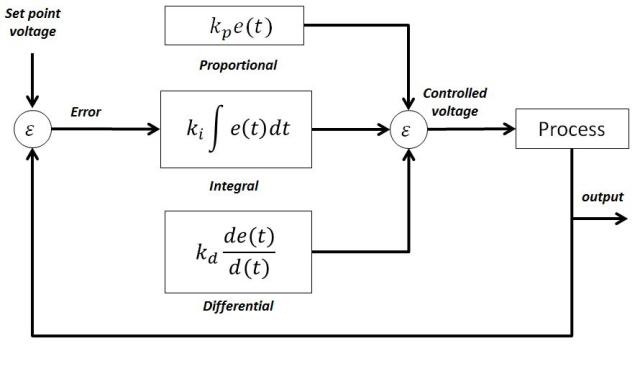 Fig. 3. Block diagram of PID controller
Fig. 3. Block diagram of PID controller
The proportional depends on the difference between the set point and the process variable and which known as error. The proportional gain determines the ratio of output response to error signal. Generally, increasing the proportional gain will increase the speed of the control system response. However, if the proportional gain is too large, the process variable will begin to oscillate. Integral will sums the error term over time. Even if there a small error term, it will cause the integral to increase slowly. The integral response will continually increase unless the error becomes zero. The derivative causes the output to decrease if the process variable is increasing rapidly. The derivative response is proportional to the rate of change of the process variable.
Based on previous research, it shows that PID controller always give a promising results in vibration control. Fadil et al. [25] implement common PID controller and PID tuned by iterative learning algorithm (ILA). PID-ILA gave higher performance than common PID in term of settling time. Rahman and Alam [13] proved that experimental result obtained using PID controller has demonstrated the efficiency and validity of the controller. Kumar et al. [4] used PID control as a medium to suppress the vibration of beam by finding the optimal placement of piezoelectric sensor/actuator on surface of beam. Several researches found used PID controller in vibration control of beam by using some methods of tuning to compare the performance for each of method [1,32].
Other studies applied adaptive or self-tuning controller because it tuned/adjusted its parameter variations which occurred in a control system [1,12,22,34]. Adaptive controller is able to adapt with uncertainty of the condition. Figure 4 show an adaptive control approach.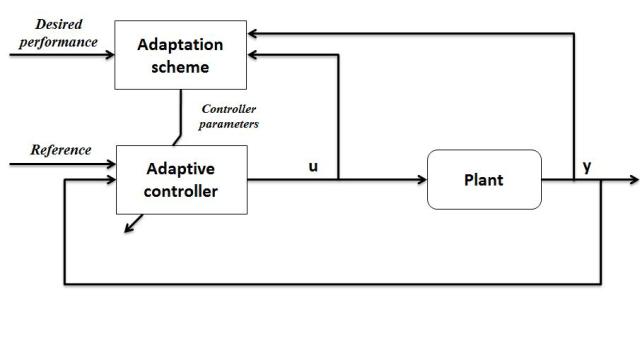 Fig. 4. General scheme of adaptive controller
Fig. 4. General scheme of adaptive controller
If the desired performance is not achieved, the adaptation scheme will react and cause adaptive control to tune the parameters continuously until the performance is satisfied according to the condition of the surroundings. For example, the vibration of aircraft structure which happen during traveling in space due to wind forces or other factors, but the forces perhaps differ in other locations or during changing of weather. That‟s why an adaptive controller must maintain the controlling performance according to related factors. Wang et al. [33] implement the adaptive sliding mode controller in flexible beam to deal with model uncertainties. The robustness of the controller is successfully demonstrated with ensured effectiveness in vibration control when masses are added to the flexible beam. Saad et al. [1] used direct adaptive controller to reduce vibration beam and significant amount of vibration reduction achieved over the full range of frequencies of the input signal. Fadil and Darus [34] also has successfully applied self-tuning PID controller for vibration suppression of flexible beam and it shown that the performance of the controller is very promising with low mean square error.
Robust controller also found to be used in AVC of beam [19]. It designed to deal with uncertainty and aimed to achieve robust performance and stability in the presence of bounded modeling errors. Informally, this controller is designed for a particular set of parameters if it would also work well under a different set of assumptions. Robust control concentrates on the tradeoffs between performance and stability in the presence of uncertainty in the system model as well as the exogenous inputs to which it is subjected [7]. Examples of robust controllers are H2, H∞ and sliding mode. Oveisi and Nestorovic [19] designed the AVC of beam and its performance of the approach is proven to be effective and robust on the experimental set up where the higher order modes take effect in the dynamics of the smart beam. Sridevi and Madhavasarma [31] design a H∞ controller that minimizes the structural vibration and performance of was compared with linear quadratic Gussian (LQG) controller based on vibration reduction. From the results, it is observed that the H∞ controller is the best suited for smart structural process.
152905-4848-IJET-IJENS © October 2015 IJENS
I J E N S
| International Journal of Engineering & Technology IJET-IJENS Vol:15 No:05 | 16 |
Omidi and Mahmoodi [35] designed H∞ modified positive position feedback (HMPPF) and H∞ modified positive velocity feedback (HMPVF) controllers as two innovative controllers for active vibration reduction in flexible collocated structures. Vibration velocity amplitude using the HMPVF approach was reduced more than displacement, which makes this controller more effective for fatigue failure prevention purposes.
After designing the controller, it needs to be optimized during operation. Controller optimization or tuning is essentials to find the best controller parameters in order to control the vibration. Optimization using evolutionary algorithms (EAs) has received countless attention to achieved better transient response in control. Evolutionary algorithm (EAs) is stochastic search and optimization methods based on principles of natural evolution and have received considerable attention. EAs operate on a population of potential solutions by applying the principle of survival of the fittest to produce successively better approximations to a solution.
EAs able to find optimal solution in global search space compared to conventional methods. Zoric et al. [12] deals with AVC of smart beams using particle swarm optimization (PSO) in self-tuning fuzzy logic controller. It is found that the PSO leads to better vibration suppression. Saad et al. [32] proved that the performance of PID tuned by differential evolution (DE) and genetic algorithm (GA) offer a better transient response than the conventional tuning method (Ziegler Nichols) in optimizing and tuning the parameters of controller. Raju et al.[27] employed PSO and GA to optimize fuzzy controller and the results shown that PSO suppressed vibration better than GA. Fadil and Darus, [34] used PSO to tune PID and PD controller and compared with iterative learning algorithm (ILA). Among 3 controllers, (PID-PSO, PD-PSO, PID-ILA), PD-PSO found to be the best with lowest mean square error. In other research, tabu ant colony optimization algorithm is implemented in controller to suppress vibration of flexible beam and the result shown the great performance of the proposed algorithm [26,34].
From the three types of controller explained previously, it can be said that conventional controller is simpler than the others. It is commonly found to be used in many applications due to its performance. However, adaptive control is better to be used in control systems whose parameters are unknown, uncertain and slowly varying, as it maintains desired performance under changing condition. In addition, it included of a real-time system identification technique which integrated with a control algorithm. This is to update the parameters of the plant model based on input and output data, use the updated model to compute a new set of controller parameters, and then compute the next control output [7]. While the robust controller control method can be implemented to measure the performance of changes of a control system with changing system parameters. It is very suitable to be developed if the system is lack of robustness of the mechanical systems due to the unmodeled dynamics and the external disturbances.
Sometimes the complexity of control law may affect the accuracy of the system‟s performance. However, the optimization also plays an important role in ensuring the control system performs well. Even though the controller used is a simple type, but if the optimization algorithm chosen is able to find effective optimal solution for controller, then the system will work well.
CONCLUSION
This paper presented a literature review concerning about active vibration control of beam. The objectives of this paper are to summarize the previous study and to attract the researchers or engineers to engage the study and development of AVC in any field regarding to its application. The concept of AVC is briefly justified based on different methodologies of modeling of beam and controlling vibration. The methods presented in this paper are widely applied AVC of flexible beam and it proved that the methods are tremendously work well in vibration suppression.
ACKNOWLEDGEMENTS
The authors would like to express their gratitude to University Malaysia Perlis for providing facilities to conduct this research. This research was funded by the Ministry of Education Malaysia through Fundamental Research Grant Scheme No. FRGS 9003-00451.
REFERENCES
- S. Saad, H.Jamaluddin, and I.Z.M. Darus, “Active Vibration Control of Flexible Beam Using Differential Evolution Optimisation,” in World Academy of Science and Technology,(2012), pp. 419–426.
- Wu, L.Huang, B.Pan, Y.Wang, and S.Wu, “Experimental Study And Numerical Simulation of Active Vibration Control of A Highly Flexible Beam Using Piezoelectric Intelligent Material,” Aerospace Science and Technology, vol. 37, (2014), pp. 10–19.
- S. Saad, H. Jamaluddin, and I. Z. M. Darus, “Active Vibration Control Of Flexible Beam System Using Proportional Control Scheme In Finite Difference Simulation Platform,” in Fourth International Conference on Modeling, Simulation and Applied Optimization, (2011), pp.1–5..
- Kumar, R.Srivastava and R.K.Srivastava,“Active Vibration Control of Smart Piezo Cantilever Beam Using PID Controller”, International Journal Research in Engineering and Technology, vol. 3, (2014), pp. 392–399.
- Nestorović, N. Durrani, and M. Trajkov, “Experimental Model Identification and Vibration Control of a Smart Cantilever Beam Using Piezoelectric Actuators and Sensors,” Journal of Electroceramics, vol. 29, (2012), pp. 42–55.
- Fei, Y.Fang, and C.Yan,“The Comparative Study of Vibration Control of Flexible Structure Using Smart Materials,” Mathematical Problems in Engineering, (2010).
- Alkhatib and M.F.Golnaraghi, “Active Structural Vibration Control : A Review,” The Shock and Vibration Digest, vol. 35 (2003), pp. 367–383.
- S.Dixit, Finite element methods for engineers. Singapore: Cengage Learning Asia, 2009.
- C. Baker, An Introductory Guide to Finite Element Anlysis. 2004.
- K.Tripathi and K.V.Gangadharan, “Design and Implementation of Active Vibration Control In Smart Structures,” International Journal of Research and Review in Mechatronic Design and Simulation, vol. 2, (2012), pp. 92–98.
- Zhang, L.He, and E.Wang, “Active vibration control of piezoelectric intelligent structures,” Journal of Computers, vol. 5, (2010), pp. 401–409.
- Z. Qiu, X. Zhang, and C.Ye, “Vibration Suppression of a Flexible Piezoelectric Beam Using BP Neural Network Controller,” Acta Mechanica Solida Sinica, vol. 25, (2012), pp. 417–428.
- P Arun, B.Ananthakrishnan and, K.V.Gangadharan, “Studies on Modeling and Prototyping of Real Time Output Feedback Controller For Active Control of Individual As Well As Multiple Dominant Modes of Flexural Vibrations In a Smart System,” Journal of Vibration and Control, 2014.
- Lengvarský, J.Bocko, and M.Hagara, “Modal Analysis of Titan Cantilever Beam Using ANSYS and SolidWorks,” American Journal of Mechanical Engineering, vol.1, (2013), pp. 271–275.
- Oveisi and T.Nestorović,“Robust Mixed H2/H∞ Active Vibration Controller In Attenuation of Smart Beam,” Facta Universitatis, vol. 12, (2014), pp. 235–249.
- Khot, N.P. Yelve, R. Tomar, S.Desai, and S.Vittal, “Active Vibration Control of Cantilever Beam By Using PID Based Output Feedback Controller,” Journal of Vibration and Control, vol. 18, (2012), pp. 366–372.
- H. Mirafzal, A.M. Khorasani, and A.H. Ghasemi, “Optimizing Time Delay Feedback For Active Vibration Control of a Cantilever Beam Using a Genetic Algorithm,” Journal of Vibration and Control, 2015.
- Shouwei,G.Zhiyuan,S.Yong,Y.Jincong, Z.Xiaojin “Performance Analysis and Comparison of FXLMS and FULMS Algorithm For Active Structure Vibration Control,” in International Conference of Advance Computer Control, vol.1, (2010), pp. 197–201.
- Chhabra, K.Narwal, and P.Singh, “Design and Analysis of Piezoelectric Smart Beam For Active Vibration Control,” International Journal of Advance Research and Technology, vol. 1, (2012), pp. 1–5.
- Y.Mohammed, Y.Y.Mohammed, and H.A.Hussein, “System Identification of Non-Linear System Using Genetic Algorithm for Development of Active Vibration Control Algorithm,” Al-Mansour Journal, vol. 18, (2012).
- A. Fadil, N.A.Jalil, and I. Z.M. Darus, “Intelligent PID Controller Using Iterative Learning Algorithm For Active Vibration Controller of Flexible Beam,” in IEEE Symposium on Computer and Informatics,(2013), pp. 80–85.
- Mohamad, M.O. Tokhi, and M. Omar, “Continuous Ant Colony Optimisation For Active Vibration Control of Flexible Beam Structures,” IEEE Inernational Conference of Mechatronics, (2011), pp.803–808.
- Raju, D.Maheswari, and S.K.Patnaik, “Active Vibration Control of Piezo Actuated Cantilever Beam Using PSO,” in Conference Electronic and Computer Science,pp.1–5, 2012.
- A.Jalil, I.Z.M.Darus and M.Mohamad,“Neuro-Juzzy Identification of Flexible Beam Structure,”Conference on Controls, Systems and Industrial Informatics,(2012), pp.185-190.
- Z.M. Darus and M.O.Tokhi, “Parametric and Non-Parametric Identification of a Two Dimensional Flexible Structure,” Journal of Low Frequency, Noise and Vibration of Active Control, vol. 25,(2006), pp.119-143
- B. Lennert Anderson, Ulf Johnsson, Karl Henrik Johanson, “A manual for system identification,” 2000.
- Sridevi and P.Madhavasarma,“Model Identification and Smart Structural Vibration Control Using H∞ controller,” Internation
