- STANDAR TEKNIK
- Pengertian Standar Teknik
Standard Teknik adalah serangkaian eksplisit persyaratan yang harus dipenuhi oleh bahan, produk, atau layanan. Jika bahan, produk atau jasa gagal memenuhi satu atau lebih dari spesifikasi yang berlaku, mungkin akan disebut sebagai berada di luar spesifikasi. Sebuah standard teknik dapat dikembangkan secara pribadi, misalnya oleh suatu perusahaan, badan pengawas, militer, dll: ini biasanya di bawah payung suatu sistem manajemen mutu. Mereka juga dapat dikembangkan dengan standar organisasi yang sering memiliki lebih beragam input dan biasanya mengembangkan sukarela standar : ini bisa menjadi wajib jika diadopsi oleh suatu pemerintahan, kontrak bisnis, dll. Istilah standard teknik yang digunakan sehubungan dengan lembar data (atau lembar spec). Sebuah lembar data biasanya digunakan untuk komunikasi teknis untuk menggambarkan karakteristik teknis dari suatu item atau produk. Hal ini dapat diterbitkan oleh produsen untuk membantu orang memilih produk atau untuk membantu menggunakan produk.
- Penggunaan Standard Teknik
Dalam rekayasa, manufaktur, dan bisnis, sangat penting bagi pemasok, pembeli, dan pengguna bahan, produk, atau layanan untuk memahami dan menyetujui semua persyaratan. Standard teknik adalah jenis sebuah standar yang sering dirujuk oleh suatu kontrak atau dokumen pengadaan. Ini menyediakan rincian yang diperlukan tentang persyaratan khusus. Standard teknik dapat ditulis oleh instansi pemerintah, organisasi standar (ASTM, ISO, CEN, dll), asosiasi perdagangan, perusahaan, dan lain-lain.
Dalam kemampuan proses pertimbangan sebuah standard teknik yang baik, dengan sendirinya, tidak selalu berarti bahwa semua produk yang dijual dengan standard teknik yang benar-benar memenuhi target yang terdaftar dan toleransi. Realisasi produksi dari berbagai bahan, produk, atau layanan yang melekat dengan melibatkan variasi output. Dengan distribusi normal, proses produksi dapat meluas melewati plus dan minus tiga standar deviasi dari rata-rata proses. Kemampuan proses bahan dan produk harus kompatibel dengan toleransi teknik tertentu. Adanya proses kontrol dan sistem manajemen mutu efektif, seperti Total Quality Management, kebutuhan untuk menjaga produksi aktual dalam toleransi yang diinginkan.
- Macam Macam Standar Teknik
1. ASME (American Society of Mechanical Engineers)
ASME, didirikan sebagai American Society of Mechanical Engineers, adalah asosiasi profesional yang, dalam kata-kata sendiri, “mempromosikan seni, ilmu pengetahuan, dan praktik rekayasa multidisiplin ilmu dan sekutu di seluruh dunia.”Ia menyelesaikan promosi melalui “terus, kode pendidikan, pelatihan dan pengembangan profesional dan standar, penelitian, konferensi dan publikasi, hubungan dengan pemerintah, dan bentuk lain dari jangkauan.” ASME demikian masyarakat teknik, organisasi standar, penelitian dan pengembangan organisasi, sebuah organisasi lobi, penyedia pelatihan dan pendidikan, dan organisasi nirlaba. Didirikan sebagai masyarakat rekayasa berfokus pada teknik mesin di Amerika Utara,
ASME adalah hari ini multidisiplin dan global. Visi organisasi lain adalah menjadi organisasi utama untuk mempromosikan seni, ilmu pengetahuan dan praktek teknik mesin dan multidisiplin ilmu dan sekutu bagi masyarakat yang beragam di seluruh dunia. Misinya adalah untuk mempromosikan dan meningkatkan kompetensi teknis dan profesional kesejahteraan anggotanya, dan melalui program kualitas dan kegiatan di teknik mesin, lebih memungkinkan praktisi untuk memberikan kontribusi pada kesejahteraan umat manusia. ASME memiliki lebih 120.000 anggota di lebih dari 150 negara di seluruh dunia.
ASME didirikan pada 1880 oleh Alexander Lyman Holley, Henry Rossiter Worthington, John Edison Sweet and Matthias N. Forney dalam menanggapi berbagai kegagalan uap boiler tekanan pembuluh. Organisasi ini dikenal untuk menetapkan kode dan standar untuk perangkat mekanis. ASME melakukan salah satu operasi terbesar di dunia penerbitan teknis melalui nya ASME Press, menyelenggarakan konferensi teknis banyak dan ratusan kursus pengembangan profesional setiap tahun, dan mensponsori penjangkauan banyak dan program pendidikan.
Nilai-nilai inti meliputi:
- Merangkul integritas dan perilaku etis
- Merangkul keragaman dan menghormati martabat dan budaya dari semua orang
- Memelihara dan menghargai lingkungan dan sumber daya alam kita dan buatan manusia
- Memfasilitasi pengembangan, penyebaran dan penerapan pengetahuan teknik
- Mempromosikan manfaat dari pendidikan berkelanjutan dan pendidikan teknik
- Menghormati dan dokumen sejarah rekayasa sementara terus merangkul perubahan
- Meningkatkan kontribusi teknis dan sosial dari insinyur
2. ANSI (American National Standards Institute)
American National Standards Institute (ANSI) adalah sebuah lembaga nirlaba swasta yang mengawasi pengembangan standar konsensus sukarela untuk produk, jasa, proses, sistem, dan personil di Amerika Serikat. Lembaga tersebut mengawasi pembuatan, diberlakukannya, dan penggunaan ribuan norma dan pedoman yang secara langsung berdampak bisnis di hampir setiap sektor.
Lembaga tersebut juga mengkoordinasikan standar Amerika Serikat dengan standar internasional sehingga produk-produk Amerika Serikat dapat digunakan di seluruh dunia. Lembaga tersebut memberi akreditasi untuk standar yang yang dikembangkan oleh perwakilan dari lembaga pengembang standar, instansi pemerintah, kelompok konsumen, perusahaan, dan lain-lain. Standar tersebut memastikan agar karakteristik dan kinerja produk yang konsisten sehingga masyarakat menggunakan definisi dan istilah yang sama, dan produk diuji dengan cara yang sama. ANSI juga memberi akreditasi bagi organisasi yang melaksanakan sertifikasi produk atau personel sesuai dengan persyaratan yang ditetapkan dalam standar internasional.
American National Standards Institute didirikan pada tanggal 19 Oktober 1918 dengan misi untuk meningkatkan daya saing global bagi bisnis dan kualitas hidup Amerika Serikat dengan mempromosikan serta memfasilitasi standar konsensus sukarela dan sistem penilaian kesesuaian.
3. ASTM (American Standard Testing and Material)
ASTM Internasional merupakan organisasi internasional sukarela yang mengembangkan standardisasi teknik untuk material, produk, sistem dan jasa. ASTM Internasional yang berpusat di Amerika Serikat. ASTM merupakan singkatan dari American Society for Testing and Material, dibentuk pertama kali pada tahun 1898 oleh sekelompokinsinyur dan ilmuwan untuk mengatasi bahan baku besi pada rel kereta api yang selalu bermasalah. Sekarang ini, ASTM mempunyai lebih dari 12.000 buah standar. Standar ASTM banyak digunakan pada negara-negara maju maupun berkembang dalam penelitian akademisi maupun industri.
Standar yang dihasilkan oleh ASTM International jatuh ke dalam enam kategori :
- Standar Spesifikasi, yang mendefinisikan persyaratan yang harus dipenuhi oleh subjek standar.
- Metode Uji Standar , yang mendefinisikan cara tes dilakukan dan ketepatan hasil. Hasil tes dapat digunakan untuk menilai kepatuhan dengan standar Spesifikasi.
- Praktek Standard, yang mendefinisikan urutan operasi yang, tidak seperti Metode Uji Standar, tidak menghasilkan hasil.
- Standar Panduan, yang menyediakan sebuah koleksi terorganisir dari informasi atau serangkaian pilihan yang tidak merekomendasikan aksi tertentu.
- Klasifikasi Baku , yang menyediakan pengaturan atau pembagian bahan, produk, sistem, atau layanan ke dalam kelompok berdasarkan karakteristik yang sama seperti asal, komposisi, sifat, atau penggunaan.
- Standar Terminologi, yang menyediakan definisi istilah yang digunakan dalam standar lain yang disepakati.
4. TEMA (The Tubular Exchanger Manufacturers Association)
The Tubular Exchanger Manufacturers Association, Inc (TEMA) adalah asosiasi perdagangan dari produsen terkemuka shell dan penukar panas tabung, yang telah merintis penelitian dan pengembangan penukar panas selama lebih dari enam puluh tahun. Standar TEMA dan perangkat lunak telah mencapai penerimaan di seluruh dunia sebagai otoritas pada desain shell dan tube penukar panas mekanik.
TEMA adalah organisasi progresif dengan mata ke masa depan. Anggota pasar sadar dan secara aktif terlibat, pertemuan beberapa kali setahun untuk mendiskusikan tren terkini dalam desain dan manufaktur. Organisasi internal meliputi berbagai subdivisi berkomitmen untuk memecahkan masalah teknis dan meningkatkan kinerja peralatan. Upaya teknis koperasi menciptakan jaringan yang luas untuk pemecahan masalah, menambah nilai dari desain untuk fabrikasi.
Apakah memiliki penukar panas yang dirancang, dibuat atau diperbaiki, Anda dapat mengandalkan pada anggota TEMA untuk memberikan desain, terbaru efisien dan solusi manufaktur. TEMA adalah cara berpikir – anggota tidak hanya meneliti teknologi terbaru, mereka menciptakan itu. Selama lebih dari setengah abad tujuan utama kami adalah untuk terus mencari inovasi pendekatan untuk aplikasi penukar panas. Akibatnya, anggota TEMA memiliki kemampuan yang unik untuk memahami dan mengantisipasi kebutuhan teknis dan praktis pasar saat ini.
5. API (American Petroleum Institute)
API atau American Petroleum Institute adalah suatu “Main US trade association ” untuk Industry Oil and Gas yang mewakili sekitar 400 Perusahaan yang tersebar di Production, Refinement and Distribution, serta industry lainnya, kadang juga disebut sebagai AOI atau American Oil Industry. Sejak tahun 1924, API sudah membuat standard untuk keperluan Industry Minyak dan Gas Alam dunia.
Fungsi utama asosiasi atas nama industri termasuk advokasi dan negosiasi dengan lembaga-lembaga pemerintah, hukum, dan peraturan; penelitian dampak ekonomi, toksikologi, dan lingkungan; pembentukan dan sertifikasi standar industri; dan penjangkauan pendidikan API baik dana dan. melakukan penelitian yang berkaitan dengan banyak aspek dari industri minyak bumi The CEO saat ini adalah Jack Gerard.
PI mendistribusikan lebih dari 200.000 eksemplar publikasi setiap tahun. Publikasi, standar teknis, dan produk elektronik dan online yang dirancang, menurut API sendiri, untuk membantu pengguna meningkatkan efisiensi dan efektivitas biaya operasi mereka, sesuai dengan persyaratan legislatif dan peraturan, dan menjaga kesehatan, menjamin keamanan, dan melindungi lingkungan hidup. Setiap publikasi diawasi oleh komite profesional industri, sebagian besar insinyur perusahaan anggota.
Saat ini API memantain sekitar 550 Standard yang meliputi seluruh aspek didalam Industry Minyak dan Gas Alam. API juga ikut terlibat secara aktif didalam pembuatan dan pengembangan ISO atau International Standard Organization yang juga sesuai untuk digunakan di dunia industry secara umum. Setiap tahunnya lebih dari 100,000 publications disebar keseluruh penjuru dunia oleh API.
6. JIS (JAPANESE INDUSTRIAL STANDARD)
Standar Industri Jepang (JIS) menentukan standar yang digunakan untuk kegiatan industri di Jepang. Proses standarisasi dikoordinasikan oleh Jepang Komite Standar Industri dan dipublikasikan melalui Asosiasi Standar Jepang. Di era Meiji, perusahaan swasta bertanggung jawab untuk membuat standar meskipun pemerintah Jepang tidak memiliki standar dan dokumen spesifikasiuntuk tujuan pengadaan untuk artikel tertentu, seperti amunisi. Ini diringkas untuk membentuk standar resmi (JES lama) pada tahun 1921. Selama Perang Dunia II, standar disederhanakan didirikan untuk meningkatkan produksi materiil.
Organisasi Jepang ini Standards Association didirikan setelah kekalahan Jepang dalam Perang Dunia II pada 1945. Para Industri Jepang Komite Standar peraturan yang diundangkan pada tahun 1946, standar Jepang (JES baru) dibentuk. Hukum Standardisasi Industri disahkan pada 1949, yang membentuk landasan hukum bagi Standar hadir Industri Jepang (JIS). Hukum Standardisasi Industri direvisi pada tahun 2004 dan “JIS tanda” (produk sistem sertifikasi) diubah sejak 1 Oktober 2005, baru JIS tanda telah diterapkan pada sertifikasi ulang. Penggunaan tanda tua diizinkan selama masa transisi tiga tahun (sampai 30 September 2008), dan setiap produsen mendapatkansertifikasi baru atau memperbaharui bawah persetujuan otoritas telah mampu untuk menggunakan merek JIS baru. Oleh karena itu semua JIS-bersertifikat produk Jepang telah memiliki JIS tanda baru sejak 1 Oktober 2008.
7. DIN (Deutsches Institut für Normung )
Deutsches Institut für Normung ( DIN , dalam bahasa Inggris, the German Institute for Standardization ) adalah organisasi nasional Jerman untuk standardisasi dan anggota ISO negara itu . DIN adalah Asosiasi Jerman yang sudah Terdaftar dan berkantor pusat di Berlin . Saat ini ada sekitar tiga puluh ribu Standar DIN , meliputi hampir setiap bidang teknologi .
DIN Didirikan pada tahun 1917 sebagai Normenausschuß der Deutschen Industrie ( NADI , ” Komite Standardisasi Industri Jerman ” ) , NADI ini berganti nama Deutscher Normenausschuß ( DNA , ” Komite Standarisasi German ” ) pada tahun 1926 untuk mencerminkan bahwa organisasi sekarang berurusan dengan isu-isu standardisasi di banyak bidang ; yaitu , tidak hanya untuk produk industri . Pada tahun 1975 itu diubah namanya lagi untuk Deutsches Institut für Normung , atau ‘ DIN ‘ dan diakui oleh pemerintah Jerman sebagai badan nasional standar resmi , yang mewakili kepentingan Jerman di tingkat internasional dan Eropa.
Akronim , ‘ DIN , ‘ sering salah diperluas sebagai Deutsche Industrienorm ( ” Standar Industri Jerman ” ) . Hal ini sebagian besar disebabkan oleh asal bersejarah DIN sebagai ” NADI ” . NADI memang diterbitkan standar mereka sebagai DI – Norm ( Deutsche Industrienorm ) . Sebagai contoh, standar pertama kali diterbitkan adalah ‘ DI – Norm 1 ‘ (tentang pin peruncing ) pada tahun 1918. Banyak orang masih mengasosiasikan DIN keliru dengan yang lama DI – Norm konvensi penamaan. Salah satu yang paling awal , dan mungkin yang paling terkenal , adalah DIN 476 – standar yang memperkenalkan ukuran kertas A -series tahun 1922 – yang diadopsi pada tahun 1975 sebagai Standar Internasional ISO 216. Contoh umum dalam teknologi modern termasuk DIN dan mini – DIN konektor . Penunjukan standar DIN menunjukkan asal-usulnya ( # menunjukkan angka ) :
- DIN # digunakan untuk standar Jerman dengan signifikansi terutama domestik atau dirancang sebagai langkah pertama menuju status internasional .
- E DIN # adalah rancangan standar dan DIN V # adalah standar awal .
- DIN EN # dipakai untuk edisi Jerman standar Eropa .
- DIN ISO # digunakan untuk edisi Jerman standar ISO .
- ISO DIN ID # digunakan jika standar ini juga telah -adopted sebagai standar Eropa .
Contoh standar DIN
- DIN 476 : ukuran kertas internasional (sekarang ISO 216 atau DIN EN ISO 216 )
- DIN 946 : Penentuan koefisien gesekan rakitan baut / mur dalam kondisi tertentu .
- DIN 1451 : jenis huruf yang digunakan oleh kereta api Jerman dan pada rambu lalu lintas
- DIN 4512 : Definisi kecepatan film , sekarang digantikan oleh ISO 5800 : 1987 , ISO 6 : 1993 dan ISO 2240 : . 2003
- DIN 31635 : transliterasi dari bahasa Arab
- DIN 72552 : nomor terminal listrik di mobil
8. BSI
BSI Standar adalah Inggris Badan Standar Nasional (NSB) dan merupakan pertama di dunia. Ia mewakili kepentingan Inggris ekonomi dan sosial di semua organisasi standar Eropa dan internasional dan melalui pengembangan solusi informasi bisnis untuk organisasi Inggris dari semua ukuran dan sektor. BSI Standar bekerja dengan industri manufaktur dan jasa, bisnis, pemerintah dan konsumen untuk memfasilitasi produksi standar Inggris, Eropa dan internasional.Bagian dari BSI Group, BSI Standar memiliki hubungan kerja yang erat dengan pemerintah Inggris, terutama melalui Departemen Inggris untuk Bisnis, Inovasi dan Keterampilan (BIS). BSI Standar adalah nirlaba mendistribusikan organisasi, yang berarti bahwa setiap keuntungan yang diinvestasikan kembali ke dalam layanan yang disediakan.
9. SNI (Standar Nasional Indoesia)
Salah satu contoh standart teknik adalah SNI ( Standart Nasional Indonesia ). SNI adalah satu – satunya standart yang berlaku secara nasional di Indonesia, dimana semua produk atau tata tertib pekerjaan harus memenuhi standart SNI ini. Agar SNI memperoleh keberterimaan yang luas antara para stakeholder, maka SNI dirumuskan dengan memenuhi WTO Code of good practice, yaitu:
- Openess :Terbuka agar semua stakeholder dapat berpartisipasi dalam pengembangan SNI;
- Transparency:agar stakeholder yang berkepentingan dapat mengikuti perkembangan SNI dari tahap pemrograman dan perumusan sampai ke tahap penetapannya.
- Consensus and impartiality :agar semua stakeholder dapat menyalurkan kepentingannya dan diperlakukan secara adil;
- Effectiveness and relevance:memfasilitasi perdagangan karena memperhatikan kebutuhan pasar dan tidak bertentangan dengan peraturan perundang-undangan yang berlaku;
- Coherence:Koheren dengan pengembangan standar internasional agar perkembangan pasar negara kita tidak terisolasi dari perkembangan pasar global dan memperlancar perdagangan internasional.
- Development dimension (berdimensi pembangunan):agar memperhatikan kepentingan publik dan kepentingan nasional dalam meningkatkan daya saing perekonomian nasional.
SNI dirumuskan oleh Panitia Teknis dan ditetapkan oleh BSN yaitu untuk membina, mengembangkan serta mengkoordinasikan kegiatan di bidang standardisasi secara nasional menjadi tanggung jawab Badan Standardisasi Nasional (BSN).
Contoh Standart Nasional Indonesia yang telah diterapkan di Indonesia salah satunya adalah tentang penggunaan Informasi dan Dokumentasi – Internasional Standard Serial Number (ISSN). SNI ini merupakan adopsi identic dari ISO 3297:2007, ini dirumuskan oleh Panitia Teknis 01-03, Informasi dan Dokumentasi, dan telah dibahas dirapat konsensus pada 21 November 2007 di Jakarta. Rapat dihadiri oleh wakil dari produsen, kelompok pakar, himpunan profesi, dan instansi terkait lainnya.
Kebutuhan kode pengenal ringkas dan unik sudah menjadi kebutuhan bagi semua pihak, pertukaran informasi yang baik diantara perpustakaan, produsen abstrak, dan pengguna data, maupun diantara pemasok, distributor dan perantara lainnya menyebabkan terciptanya kode standart. Standart nasional ini menjelaskan dan memasyarakatkan penggunaan kode stansart (ISSN) sebagai identifikasi unik untuk terbitan berseri dan sumber daya berlanjut lainnya.
ISSN adalah nomor denan 8 digit, termasuk digit cek, dan diketahui oleh ISSN yang diberikan kepada sumberdaya berlanjut oleh jaringan ISSN.
Susunan ISSN :
- ISSN terdiri atas delapan digit berupa angka 0 sampai 9, kecuali digit terakhir (posisi paling kanan) yang dapat juga berupa huruf besar X. digit terakhir dapat menjadi digit cek.
- Digit cek dihitung berdasarkan modulus 11 dengan bobot 8 sampai 2 dan X harus digunakan sebagai digit cek bila digit cek adalah 10.
- ISSN harus didahului dengan singkatan ISSN dan satu spasi, serta ditampilkan dalam dua kelompok yang masing – masing terdiri atas empat digit yang dipisahkan oleh tanda hugung. Contoh : ISSN 0251 – 1479.
Pemberian ISSN
- ISSN hanya diberikan oleh pusat dalam jaringan ISSN. Jaringan ISSN adalah lembaga kolektifyang terdiri atas Pusat Internasional ISSN serta pusat nasional dan regional yang menjalankan administrasi pemberian ISSN.
- Metadata untuk sumber daya berlanjut yang mendapatkan ISSN harus dikumpulkan dan diserahkan pada waktu yang ditentukan oleh Pusat Internasional ISSN ke Register ISSN oleh pusat dalam jaringan ISSN yang mendaftar sumber daya berlanjut.
- Untuk setiap sumber daya berlanjut dalam media tertentu sebagaimana ditentukan dalam ISSN Manual hanya diberikan satu ISSN.
- Setiap ISSN terkait selamanya dengan judul kunci yang ditetapkan oleh jaringan ISSN pada saat pendaftaran.
- Bila suatu sumber daya berlanjut diterbitkan dalam media yang berbeda dengan judul yang sama atau berbeda, ISSN dan judul kunci yang berlainan harus diberikan untuk setiap edisi.
- Bila sumber daya berlanjut mengalami perubahan berarti dalam judul atau perubahan besar lain seperti yang disebut dalam ISSN Manual, ISSN baru harus diberikan dan judul kunci baru harus dibuat.
- ISSN yang telah diberikan untuk sumber daya berlanjut tidak dapat diubah, diganti atau digunakan lagi untuk terbitan lain.
- Judul kunci ditetapkan atau disahkan oleh pusat ISSN yang bertanggung jawab atas pendaftaran sumber daya berlanjut, sesuai dengan peraturan yang terdapat dalam ISSN Manual.
- Pemberian ISSN kepada sumber daya berlanjut tidak dapat diartikan atau dianggap sebagai bukti hokum kepemilikan hak cipta atas suatu terbitan atau isinya
- STANDAR MANAJEMEN
2.1 Pengertian Standar Manajemen Mutu
Standar manajemen adalah struktur tugas, prosedur kerja, sistem manajemen dan standar kerja dalam bidang kelembagaan, usaha serta keuangan. Namun pengertian standar manajemen akan lebih spesifik jika menjadi standar manajemen mutu, untuk mendukung standarisasi pada setiap mutu produk yang di hasilkan perusahan maka hadirlah Organisasi Internasional untuk Standarisasi yaitu Internasional Organization for Standardization (ISO) berperan sebagai badan penetap standar internasional yang terdiri dari wakil-wakil badan standarisasi nasional setiap negara
ISO didirikan pada 23 februari 1947, ISO menetapkan standar-standar industrial dan komersial dunia, ISO adalah jaringan institusi standar nasional dari 148 negara, pada dasarnya satu anggota pernegara, ISO bukan organisasi pemerintah ISO menempati posisi spesial diantara pemerintah dan swasta. Oleh karena itu, ISO mampu bertindak sebagai organisasi yang menjembatani dimana konsensus dapat diperoleh pada pemecahan masalah yang mempertemukan kebutuhan bisnis dan kebutuhan masyarakat.
Proses sertifikasi untuk persyaratan Standar Sistem Manajemen Mutu, misalnya ISO 9001:2000, adalah diakui sebagai suatu upaya dan cara uji dari peningkatan kinerja dan produktifitas perusahaan dan juga sebagai pembanding terhadap hasil kerja dan pencapaian keunggulan bisnis. Yang dimaksud mutu disini adalah gambaran dan karakteristik konsumen atau pelanggan dari barang atau jasa yang menunjukan kemampuannya dalam memuaskan konsumen sesuai dengan kebutuhan yang di tentukan.
Dari uraian di atas maka sangat penting sebagai mahasiswa teknik mesin untuk mengerti dan memahami standar manajemen mutu karena standar manajemen mutu sangat berperan penting terhadap kualitas produk atau output dari suatu perusahaan. Pemahaman standar manajemen mutu yang bertarap internasional juga tentunya akan berpengaruh pada pola berpikir dan cara bekerja mahasiswa di dunia industri, diharapkan mahasiswa akan memiliki kualitas yang setarap kualitas internasional tentu akan mampu bersaing dan menghasilkan output yang sangat berkualitas.
2.2 ISO 9000
ISO 9000 adalah kumpulan standar untuk sistem manajemen mutu (SMM). ISO 9000 yang dirumuskan oleh TC 176 ISO, yaitu organisasi internasional di bidang standardisasi. ISO 9000 pertama kali dikeluarkan pada tahun 1987 oleh International Organization for Standardization Technical Committee (ISO/TC) 176. ISO/TC inilah yang bertanggungjawab untuk standar-standar sistem manajemen mutu. ISO/TC 176 menetapkan siklus peninjauan ulang setiap lima tahun, guna menjamin bahwa standar-standar ISO 9000 akan menjadi up to date dan relevan untuk organisasi. Revisi terhadap standar ISO 9000 telah dilakukan pada tahun 1994 dan tahun 2000.
- adanya satu set prosedur yang mencakup semua proses penting dalam bisnis
- adanya pengawasan dalam proses pembuatan untuk memastikan bahwa sistem menghasilkan produk-produk berkualitas;
- tersimpannya data dan arsip penting dengan baik;
- adanya pemeriksaan barang-barang yang telah diproduksi untuk mencari unit-unit yang rusak, dengan disertai tindakan perbaikan yang benar apabila dibutuhkan.
- secara teratur meninjau keefektifan tiap-tiap proses dan sistem kualitas itu sendiri.
Sebuah perusahaan atau organisasi yang telah diaudit dan disertifikasi sebagai perusahaan yang memenuhi syarat-syarat dalam ISO 9001 berhak mencantumkan label “ISO 9001 Certified” atau “ISO 9001 Registered”.
Sertifikasi terhadap salah satu ISO 9000 standar tidak menjamin kualitas dari barang dan jasa yang dihasilkan. Sertifikasi hanya menyatakan bahwa bisnis proses yang berkualitas dan konsisten dilaksanakan di perusahaan atau organisasi tersebut. Walaupan standar-standar ini pada mulanya untuk pabrik-pabrik, saat ini mereka telah diaplikasikan ke berbagai perusahaan dan organisasi, termasuk perguruan tinggi dan universitas.
2.3 Kumpulan Standar ISO 9000
ISO 9000 mencakup standar-standar di bawah ini:
- ISO 9000 – Quality Management Systems – Fundamentals and Vocabulary: mencakup dasar-dasar sistem manajemen kualitas dan spesifikasi terminologidari Sistem Manajemen Mutu (SMM).
- ISO 9001 – Quality Management Systems – Requirements: ditujukan untuk digunakan di organisasi manapun yang merancang, membangun, memproduksi, memasang dan/atau melayani produk apapun atau memberikan bentuk jasa apapun. Standar ini memberikan daftar persyaratan yang harus dipenuhi oleh sebuah organisasi apabila mereka hendak memperoleh kepuasanpelanggan sebagai hasil dari barang dan jasa yang secara konsisten memenuhi permintaan pelanggan tersebut. Implementasi standar ini adalah satu-satunya yang bisa diberikan sertifikasi oleh pihak ketiga.
- ISO 9004 – Quality Management Systems – Guidelines for Performance Improvements: mencakup perihal perbaikan sistem yang terus-menerus. Bagian ini memberikan masukan tentang apa yang bisa dilakukan untuk mengembangkan sistem yang telah terbentuk lama. Standar ini tidaklah ditujukan sebagai panduan untuk implementasi, hanya memberikan masukan saja.
Masih banyak lagi standar yang termasuk dalam kumpulan ISO 9000, dimana banyak juga diantaranya yang tidak menyebutkan nomor “ISO 9000” seperti di atas. Beberapa standar dalam area ISO 10000 masih dianggap sebagai bagian dari kumpulan ISO 9000. Sebagai contoh ISO 10007:1995 yang mendiskusikan Manajemen Konfigurasi dimana di kebanyakan organisasi adalah salah satu elemen dari suatu sistem manajemen.
ISO mencatat “Perhatian terhadap sertifikasi sering kali menutupi fakta bahwa terdapat banyak sekali bagian dalam kumpulan standar ISO 9000 . Suatu organisasi akan meraup keuntungan penuh ketika standar-standar baru diintegrasikan dengan standar-standar yang lain sehingga seluruh bagian ISO 9000 dapat diimplementasikan”. Sebagai catatan, ISO 9001, ISO 9002 dan ISO 9003 telah diintegrasikan menjadi ISO 9001. Kebanyakan, sebuah organisasi yang mengumumkan bahwa dirinya “ISO 9000 Registered” biasanya merujuk pada ISO 9001.
2.4 SYSTEM MANAJEMEN PRODUKSI TQM
Total Quality MANAGEMENT (TQM) mengacu pada penekanan kualitas yang meliputi organisasi keseluruhan, mulai dari pemasok hingga pelanggan. TQM menekankan komitmen manajemen untuk mendapatkan arahan perusahaan yang ingin terus meraih keunggulan dalam semua aspek produk dan jasa penting bagi pelanggan. Ada beberapa elemen bahwa sesuatu dikatakan berkualitas, yaitu:
- Kualitas meliputi usaha memenuhi atau melebihi harapan pelanggan
- Kualitas mencakup produk, jasa, manusia, proses, dan lingkungan
- Kualitas merupakan kondisi yang selalu berubah (apa yang dianggap berkualitas saat ini mungkin dianggap kurang berkualitas pada saat yang lain).
- Kualitas merupakan suatu kondisi dinamis yang berhubungan dengan produk, jasa, manusia, proses, dan lingkungan yang memenuhi atau melebihi harapan.
Manfaat Program TQM
TQM sangat bermanfaat baik bagi pelanggan, institusi, maupun bagi staf organisasi.
Manfaat TQM bagi pelanggan adalah:
- Sedikit atau bahkan tidak memiliki masalah dengan produk atau pelayanan.
- Kepedulian terhadap pelanggan lebih baik atau pelanggan lebih diperhatikan.
- Kepuasan pelanggan terjamin.
Manfaat TQM bagi institusi adalah:
- Terdapat perubahan kualitas produk dan pelayanan
- Staf lebih termotivasi
- Produktifitas meningkat
- Biaya turun
- Produk cacat berkurang
- Permasalahan dapat diselesaikan dengan cepat.
Manfaat TQM bagi staf Organisasi adalah:
- Pemberdayaan
- Lebih terlatih dan berkemampuan
- Lebih dihargai dan diakui
Manfaat lain dari implementasi TQM yang mungkin dapat dirasakan oleh institusi di masa yang akan datang adalah:
- Membuat institusi sebagai pemimpin (leader) dan bukan hanya sekedar pengikut (follower)
- Membantu terciptanya tim work
- Membuat institusi lebih sensitif terhadap kebutuhan pelanggan
- Membuat institusi siap dan lebih mudah beradaptasi terhadap perubahan
- Hubungan antara staf departemen yang berbeda lebih mudah
Tujuh konsep program TQM yang efektif yaitu perbaikan berkesinambungan, Six Sigma, pemberdayaan pekerja, benchmarking, just-in-time (JIT), konsep Taguchi, dan pengetahuan perangkat TQM
2.5 STANDAR MANAJEMEN KESELAMATAN DAN KESEHATAN KERJA
Pengertian (Definisi) Sistem Manajemen K3 (Keselamatan dan Kesehatan Kerja) secara umum merujuk pada 2 (dua) sumber, yaitu Permenaker No 5 Tahun 1996 tentang Sistem Manajemen Keselamatan dan Kesehatan Kerja dan pada Standar OHSAS 18001:2007 Occupational Health and Safety Management Systems.
Pengertian (Definisi) Sistem Manajemen K3 (Keselamatan dan Kesehatan Kerja) menurut Permenaker No 5 Tahun 1996 tentang Sistem Manajemen Keselamatan dan Kesehatan Kerja ialah bagian dari sistem secara keseluruhan yang meliputi struktur organisasi, perencanaan, tanggung-jawab, pelaksanaan, prosedur, proses dan sumber daya yang dibutuhkan bagi pengembangan, penerapan, pencapaian, pengajian dan pemeliharaan kebijakan Keselamatan dan Kesehatan Kerja dalam rangka pengendalian resiko yang berkaitan dengan kegiatan kerja guna terciptanya tempat kerja yang aman, efisien dan produktif. Sedangkan Pengertian (Definisi) Sistem Manajemen K3 (Keselamatan dan Kesehatan Kerja) menurut standar OHSAS 18001:2007 ialah bagian dari sebuah sistem manajemen organisasi (perusahaan) yang digunakan untuk mengembangkan dan menerapkan Kebijakan K3 dan mengelola resiko K3 organisasi (perusahaan) tersebut.
Elemen-Elemen Sistem Manajemen Keselamatan dan Kesehatan Kerja bisa beragam tergantung dari sumber (standar) dan aturan yang kita gunakan. Secara umum, Standar Sistem Manajemen Keselamatan Kerja yang sering (umum) dijadikan rujukan ialah Standar OHSAS 18001:2007, ILO-OSH:2001 dan Permenaker No 5 Tahun 1996 tentang Sistem Manajemen Keselamatan dan Kesehatan Kerja.
2.6 OHSAS 18000
Standar OHSAS 18000 merupakan spesifikasi dari sistem manajemen kesehatan dan keselamatan kerja internasional untuk membantu organisasi mengendalikan resiko terhadap kesehatan dan keselamatan pekerjanya. dalam perusahaan harus memiliki standar OHSAS 18000, hal ini penting bagi keselamatan kerja di perusahaan sehingga akan menghasilkan produksi yang berjalan lancar dan berdampak baik bagi karyawan untuk mencegah atau memperkecil tingkat kecelakaan.
Apabila perusahaan tersebut bergerak di bidang industri yang memproduksi suatu barang dengan menggunakan alat-alat berat yang paling diutamakan adalah kesehatan dan keselamatan karyawan dalam bertugas, sehingga perusahaan harus memperhatikan kebutuhan fisik terhadap karyawan, seperti memberi makan kepada karyawan pada waktu jam makan & istirahat yang cukup umtuk menjaga kesehatan karyawan. begitu juga dibutuhkan keselamatan kerja dalam bertugas, oleh karena itu perusahaan membuat aturan/prosedur untuk diterapkan pada karyawannya. bagi keselamatan karyawan harus lah menggunakan pakaian yang aman atau pelindung diri menurut aturan perusahaan sehingga memperkecil tingkat kecelakan. Dengan adanya OHSAS 18000 perusahaan pun akan berjalan dengan baik karena kesehatan dan keselamatan kerja bagi karyawan sangat diperhatikan dan menguntungkan bagi perusahaan dalam meningkatkan hasil produksi, dalam hal ini berdampak positif sehingga saling menguntungkan bagi perusahaan maupun karyawan.
2.7 STANDAR MANAJEMEN LINGKUNGAN
Standar Manajemen adalah serangkaian syarat-syarat dan sistem-sistem yang harus dipenuhi dalam mengatur permasalahan yang ada di dalam suatu bidang. Standar-standar manajemen terdiri dari ISO 14000, ISO 9000, OHSAS 18000 dan lain-lain.
ISO 14000
Standar manajemen lingkungan yang sifatnya sukarela tetapi konsumen menuntut produsen untuk melaksanakan program sertifikasi tersebut. Pelaksanaan program sertifikasi ISO 14000 dapat dikatakan sebagai tindakan proaktif dari produsen yang dapat mengangkat citra perusahaan dan memperoleh kepercayaan dari konsumen. Dengan demikian maka pelaksanaan Sistem Manajemen Lingkungan (SML) berdasarkan Standar ISO Seri 14000 bukan merupakan beban tetapi justru merupakan kebutuhan bagi produsen (Kuhre, 1996).
ISO 9000
kumpulan standar untuk sistem manajemen mutu (SMM). ISO 9000 yang dirumuskan oleh TC 176 ISO, yaitu organisasi internasional di bidang standardisasi. ISO 9000 pertama kali dikeluarkan pada tahun 1987 oleh International Organization for Standardization Technical Committee (ISO/TC) 176. ISO/TC inilah yang bertanggungjawab untuk standar-standar sistem manajemen mutu. ISO/TC 176 menetapkan siklus peninjauan ulang setiap lima tahun, guna menjamin bahwa standar-standar ISO 9000 akan menjadi up to datedan relevan untuk organisasi. Revisi terhadap standar ISO 9000 telah dilakukan pada tahun 1994 dan tahun 2000.
OHSAS 18000
Standar OHSAS 18000 merupakan spesifikasi dari system kesehatan dan keselamatan kerja Internasional untuk membantu organisasi mengendalikan resiko terhadap kesehatan dan keselamatan personilnya.
2.8 ISO 14000
Standar manajemen lingkungan yang sifatnya sukarela tetapi konsumen menuntut produsen untuk melaksanakan program sertifikasi tersebut. Pelaksanaan program sertifikasi ISO 14000 dapat dikatakan sebagai tindakan proaktif dari produsen yang dapat mengangkat citra perusahaan dan memperoleh kepercayaan dari konsumen. Dengan demikian maka pelaksanaan Sistem Manajemen Lingkungan (SML) berdasarkan Standar ISO Seri 14000 bukan merupakan beban tetapi justru merupakan kebutuhan bagi produsen (Kuhre, 1996).
ISO 14000 adalah standar internasional tentang sistem manejemen lingkungan (Rothery, 1995) yang sangat penting untuk di ketahui dan di laksanakan oleh seluruh sektor industri. Mengapa di katakan sangat penting? Itu sangat jelas sekali bahwa segala aktivitas di semua sektor industri keci, besar akan berpemgaruh pada lingkungan yang akan sangat berpengaruh bagi makluk hidup di sekitarnya, bukan hanya kita sebagai mausia, tetapi hewan dan tumbuhan akan juga mendapatkan dampaknya.
Dalam mengelola lingkungan maka dibutuhkan standar yang jelas, yaitu ISO 14000. Sistem ISO 14000 adalah standar sistem pengelolaan lingkungan yang dapat diterapkan pada bisnis apapun, terlepas dari ukuran, lokasi, atau pendapatan. Tujuan dari sitem ini adalah untuk mengurangi kerusakan lingkungan yang disebabkan oleh bisnis dan untuk mengurangi polusi dan limbah yang dihasilkan oleh bisnis.
Manfaat dari ISO 14000 adalah :
- Pengelolaan lingkungan yang lebih efektif dan efisien dalam organisasi
- Untuk menyediakan tools yang berguna dan bermanfaat dan fleksibel sehingga mencerminkan organisasi yang baik.
- Dapat mengidanfikasi, memperkirakan dan mengatasi resiko lingkungan yang mungkin timbul.
- Dapat menekan biaya produksi dapat mengurangi kecelakan kerja, dapat memelihara hubungan baik dengan masyarakat, pemerintah dan pihak – pihak yang peduli terhadap lingkungan.
- Memberi jaminan kepada konsumen mengenai komitmen pihak manajemen puncak terhadap lingkungan.
- Dapat meningkat citra perusahaan,meningkatkan kepercayaan konsumen dan memperbesar pangsa pasar.
- Menunjukan ketaatan perusahaan terhadap perundang – undangan yang berkaitan dengan lingkungan.
- Mempermudah memperoleh izin dan akses kredit bank.
- Dapat meningkatakan otivasi para pekerja.
ISO 14000 menawarkan guidance untuk memperkenalkan dan mengadopsi sistem manajemen lingkungan berdasarkan pada praktek – praktek terbaik, hampir sama di ISO 9000 pada sistem manajemen mutu yang sekarang diterapkan secara luas. ISO 14000 ada untuk membantu organisasi meminimalkan bagaimana operasi mereka berdampak negatif pada lingkungan. Sistem ini dapat diterapkan berdampingan dengan ISO 9000.
Sertifikasi ISO 14000
Agar suatu organisasi dianugerahi ISO 14000 mereka harus diaudit secara eksternal oleh badan audit yang telah terakreditasi. Badan sertifikasi harus diakreditasi oleh ANSI-ASQ, Badan Akreditasi Nasional di Amerika Serikat, atau Badan Akreditasi Nasional di Irlandia.
Memahami konsep ISO 14000
Konsep utama yang merupakan kunci untuk menjalankan ISO 14000 adalah Manajemen dan Kebijakan Kinerja Lingkungan. Manajer puncak harus menetapakan kebijakan lingkungan organisasi dan menjamin bahwa kewajiban:
- Sesuai dengan sifat, skala dan dampak lingkungan kegiatan, produk atau jasa.
- Termasuk komitmen untuk peningkatan berkelanjutan dan pencegahan pencemaran.
- Termasuk komitmen untuk patuh terhadap peraturan lingkungan terikat dan persyaratan – persyaratan lain terhadap perusahaan.
- Memberiakan kerangka kerja untuk membuat dan menkaji tujuan dan sasaran lingkung.
- Didokumentasikan, diterapkan dipelihara dan dikomunikasikan kepadasemua karyawan.
- Tersedia kepada masyarakat.
Sumber:
http://fajarisman31.blogspot.co.id/2015/01/pengertian-standar-teknik-proses.html
http://andriblogg99.blogspot.co.id/p/standar-standar-teknik.html
http://fajarisman31.blogspot.co.id/2015/01/pengertian-standar-teknik-proses.html
Standar Teknik dan Manajemen
http://dame-dame0123.blogspot.co.id/2014/11/pengertian-din-standar-industri-jerman.html

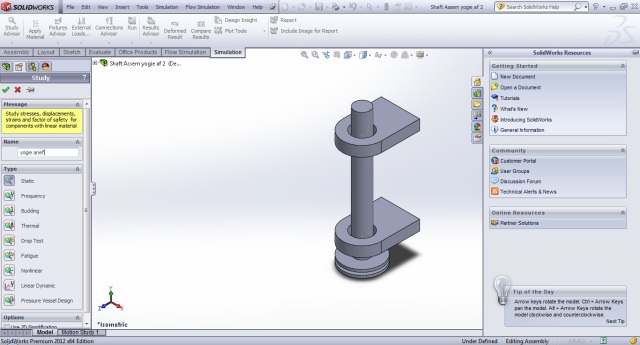
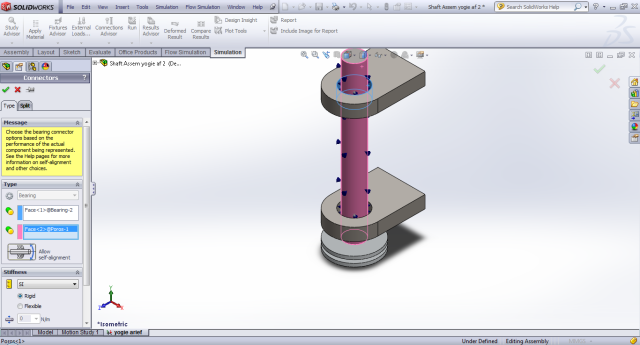
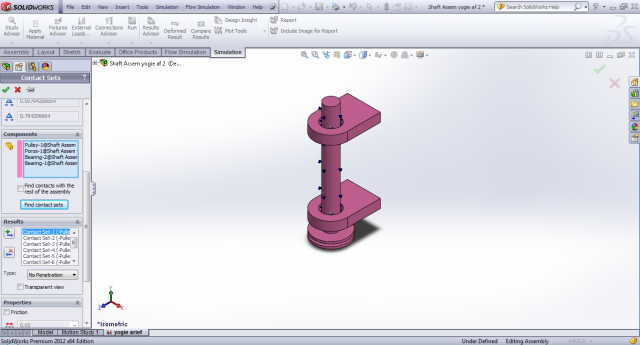
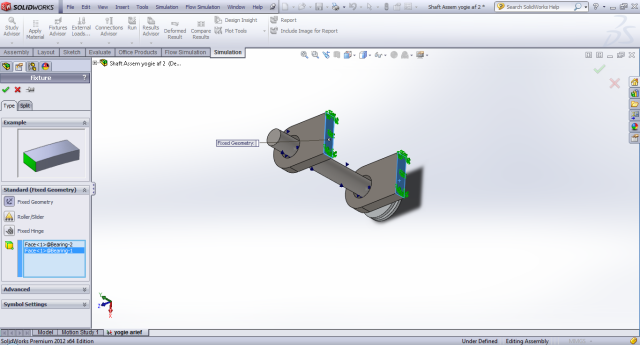
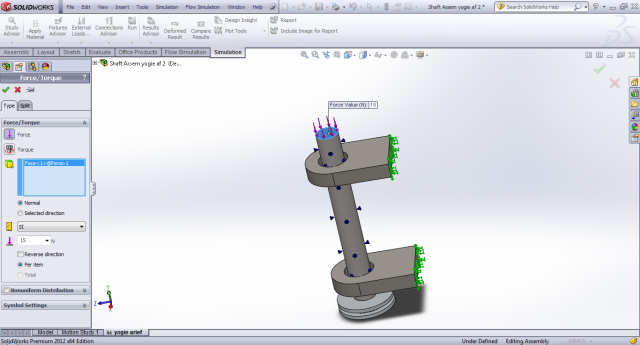
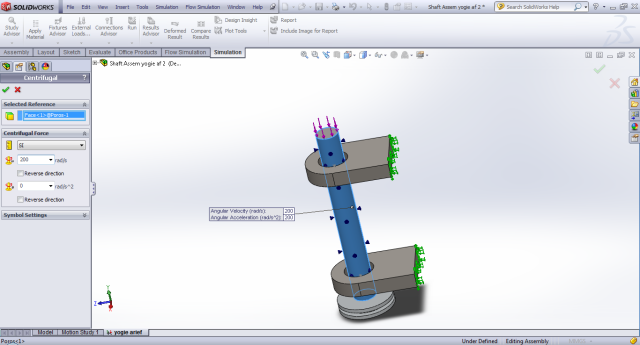
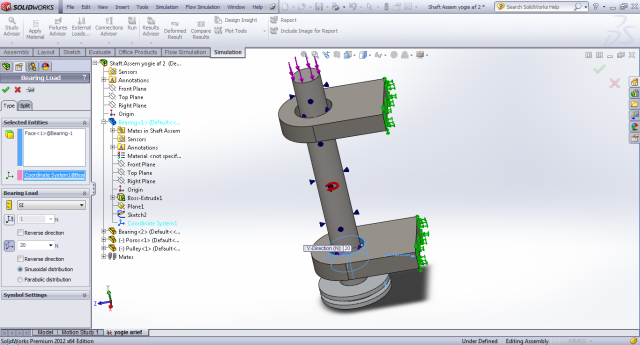
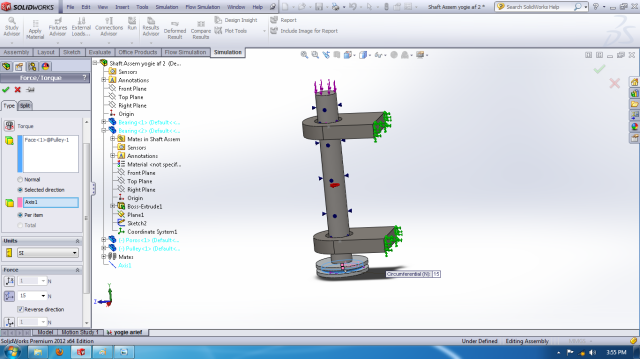

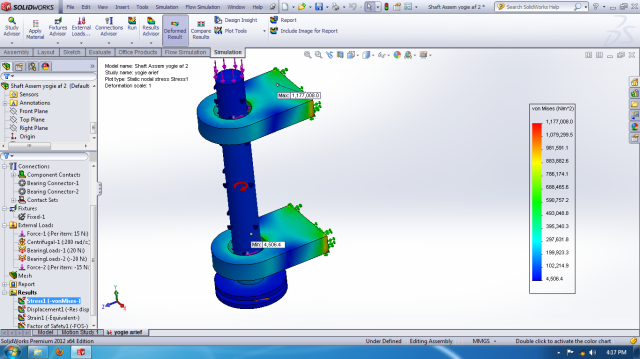 Dari hasil analisis di atas, dapat diketahui besar tegangan maksimum terjadi pada part Bearing 2 (bearing atas) adalah sebesar 1,177,008.0 N/m2 dengan posisi bagian sudut pada bearing 2 sekitar fixed geometry. Hal ini disebabkan dari arah Gaya ke bawah pada ujung Poros sebesar 15 N, Centrifugal Load pada poros sebesar 200 rad/s, serta pada kedua Bearing diberikan Load sebesar 20 N. Serta Pulley 15 N.
Dari hasil analisis di atas, dapat diketahui besar tegangan maksimum terjadi pada part Bearing 2 (bearing atas) adalah sebesar 1,177,008.0 N/m2 dengan posisi bagian sudut pada bearing 2 sekitar fixed geometry. Hal ini disebabkan dari arah Gaya ke bawah pada ujung Poros sebesar 15 N, Centrifugal Load pada poros sebesar 200 rad/s, serta pada kedua Bearing diberikan Load sebesar 20 N. Serta Pulley 15 N.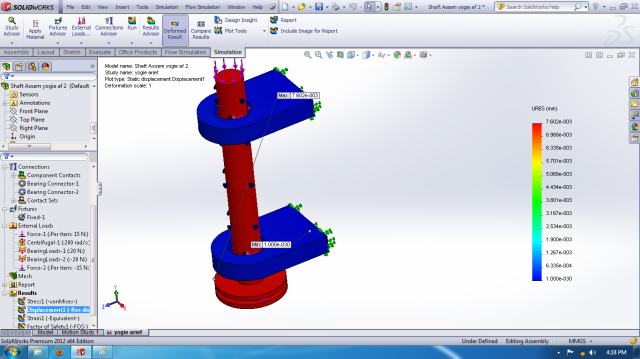 Dari hasil analisis dapat diketahui besar displacement maksimum yang didapatkan adalah sebesar 7.602e-003 mm dengan posisi displacement maksimum terdapat pada part bearing 1. Hal ini disebabkan karena tegangan yang terjadi pada bearing 2 dan menumpu part-part lain salah satunya bearing 1. Sehingga yang terjadi gaya pada part bearing 2 merambat sampai pada daerah bearing 1 dan menghasilkan perubahan yang maksimal pada bearing tersebut.
Dari hasil analisis dapat diketahui besar displacement maksimum yang didapatkan adalah sebesar 7.602e-003 mm dengan posisi displacement maksimum terdapat pada part bearing 1. Hal ini disebabkan karena tegangan yang terjadi pada bearing 2 dan menumpu part-part lain salah satunya bearing 1. Sehingga yang terjadi gaya pada part bearing 2 merambat sampai pada daerah bearing 1 dan menghasilkan perubahan yang maksimal pada bearing tersebut. Dari hasil analisis dapat diketahui besar strain maksimum yang didapatkan adalah sebesar 4.017e-006 mm dengan posisi strain maksimum terdapat pada part bearing 2. Bearing tersebut meregang, diakibatkan tegangan maksimal berada pada daerah tersebut.
Dari hasil analisis dapat diketahui besar strain maksimum yang didapatkan adalah sebesar 4.017e-006 mm dengan posisi strain maksimum terdapat pada part bearing 2. Bearing tersebut meregang, diakibatkan tegangan maksimal berada pada daerah tersebut.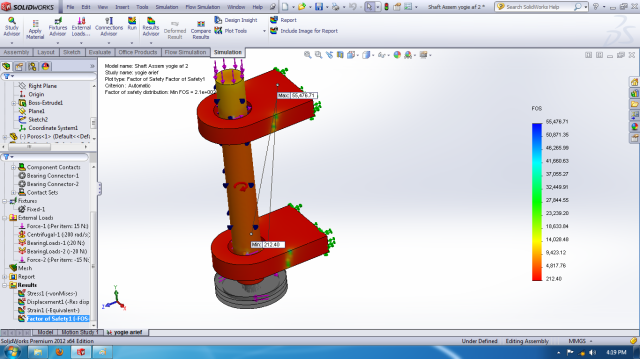
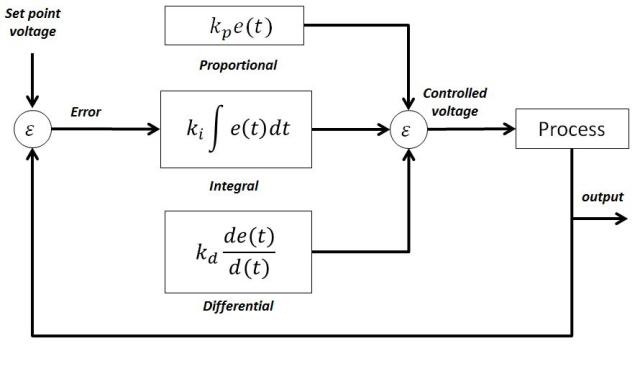 Gambar 3. Blok diagram dari kontroler PID
Gambar 3. Blok diagram dari kontroler PID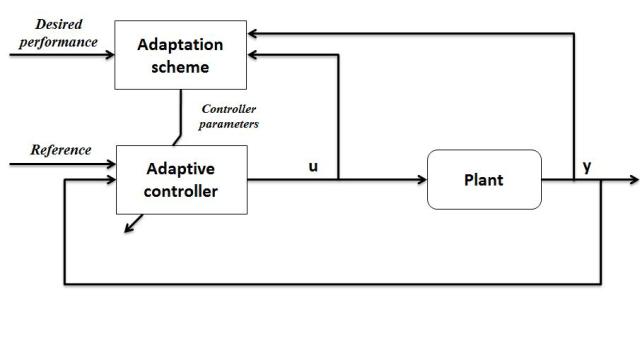 Gambar 4. Skema Umum kontroler adaptif
Gambar 4. Skema Umum kontroler adaptif


